Tikz - Mechanical Systems
Table of Contents
- 1. Mass-Spring Systems
- 2. Mass-Spring Systems - bis
- 3. Control Based on distance measurement
- 4. Inertial Control
- 5. Force Feedback Control
- 6. Inertial Sensor
- 7. Mechanical Systems
- 8. 3D
- 9. Gravity Compensation System
- 10. 3Dof System
- 11. 3Dof System - bis
- 12. Rotating System
- 13. Guiding Errors
- 14. Vibration analysis procedure
- 15. Pendulum Experiment
1 Mass-Spring Systems
1.1 One mass
\def\massw{2.2} % Width of the masses \def\massh{0.8} % Height of the masses \def\spaceh{1.4} % Height of the springs/dampers \def\dispw{0.3} % Width of the dashed line for the displacement \def\disph{0.5} % Height of the arrow for the displacements \def\bracs{0.05} % Brace spacing vertically \def\brach{-10pt} % Brace shift horizontaly
\draw (-0.5*\massw, 0) -- (0.5*\massw, 0); \draw[dashed] (0.5*\massw, 0) -- ++(\dispw, 0); \draw[->] (0.5*\massw+0.5*\dispw, 0) -- ++(0, \disph) node[right]{$x_{w}$};
% Mass \draw[fill=white] (-0.5*\massw, \spaceh) rectangle (0.5*\massw, \spaceh+\massh) node[pos=0.5]{$m_{g}$}; % Spring, Damper, and Actuator \draw[spring] (-0.4*\massw, 0) -- (-0.4*\massw, \spaceh) node[midway, left=0.1]{$k_{g}$}; \draw[damper] (0, 0) -- ( 0, \spaceh) node[midway, left=0.2]{$c_{g}$}; \draw[actuator] ( 0.4*\massw, 0) -- ( 0.4*\massw, \spaceh) node[midway, left=0.1](F){$F_{g}$}; % Displacements \draw[dashed] (0.5*\massw, \spaceh) -- ++(\dispw, 0); \draw[->] (0.5*\massw+0.5*\dispw, \spaceh) -- ++(0, \disph) node[right]{$x_{g}$}; % Legend % \draw[decorate, decoration={brace, amplitude=8pt}, xshift=\brach] % % (-0.5*\massw, \bracs) -- (-0.5*\massw, \spaceh+\massh-\bracs) % % node[midway,rotate=90,anchor=south,yshift=10pt]{};
\begin{tikzpicture} <<tikz_1dof_smd_params>> <<tikz_1dof_smd_ground>> <<tikz_1dof_smd_mass>> \end{tikzpicture}
1.2 Two masses
\begin{tikzpicture} % ==================== % Parameters % ==================== \def\massw{2.2} % Width of the masses \def\massh{0.8} % Height of the masses \def\spaceh{1.2} % Height of the springs/dampers \def\dispw{0.3} % Width of the dashed line for the displacement \def\disph{0.5} % Height of the arrow for the displacements \def\bracs{0.05} % Brace spacing vertically \def\brach{-10pt} % Brace shift horizontaly % ==================== % ==================== % Ground % ==================== \draw (-0.5*\massw, 0) -- (0.5*\massw, 0); \draw[dashed] (0.5*\massw, 0) -- ++(\dispw, 0); \draw[->] (0.5*\massw+0.5*\dispw, 0) -- ++(0, \disph) node[right]{$x_{w}$}; % ==================== \begin{scope}[shift={(0, 0)}] % Mass \draw[fill=white] (-0.5*\massw, \spaceh) rectangle (0.5*\massw, \spaceh+\massh) node[pos=0.5]{$m_{g}$}; % Spring, Damper, and Actuator \draw[spring] (-0.4*\massw, 0) -- (-0.4*\massw, \spaceh) node[midway, left=0.1]{$k_{g}$}; \draw[damper] (0, 0) -- ( 0, \spaceh) node[midway, left=0.2]{$c_{g}$}; \draw[actuator] ( 0.4*\massw, 0) -- ( 0.4*\massw, \spaceh) node[midway, left=0.1](F){$F_{g}$}; % Displacements \draw[dashed] (0.5*\massw, \spaceh) -- ++(\dispw, 0); \draw[->] (0.5*\massw+0.5*\dispw, \spaceh) -- ++(0, \disph) node[right]{$x_{g}$}; % Legend % \draw[decorate, decoration={brace, amplitude=8pt}, xshift=\brach] % % (-0.5*\massw, \bracs) -- (-0.5*\massw, \spaceh+\massh-\bracs) % % node[midway,rotate=90,anchor=south,yshift=10pt]{}; \end{scope} \begin{scope}[shift={(0, \spaceh+\massh)}] % Mass \draw[fill=white] (-0.5*\massw, \spaceh) rectangle (0.5*\massw, \spaceh+\massh) node[pos=0.5]{$m_{s}$}; % Spring, Damper, and Actuator \draw[spring] (-0.4*\massw, 0) -- (-0.4*\massw, \spaceh) node[midway, left=0.1]{$k_{s}$}; \draw[damper] (0, 0) -- ( 0, \spaceh) node[midway, left=0.2]{$c_{s}$}; % Displacements \draw[dashed] (0.5*\massw, \spaceh) -- ++(\dispw, 0); \draw[->] (0.5*\massw+0.5*\dispw, \spaceh) -- ++(0, \disph) node[right]{$x_{s}$}; % Legend % \draw[decorate, decoration={brace, amplitude=8pt}, xshift=\brach] % % (-0.5*\massw, \bracs) -- (-0.5*\massw, \spaceh+\massh-\bracs) % % node[midway,rotate=90,anchor=south,yshift=10pt]{}; \end{scope} \end{tikzpicture}
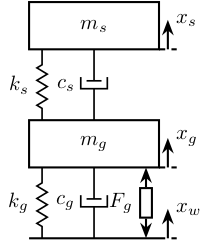
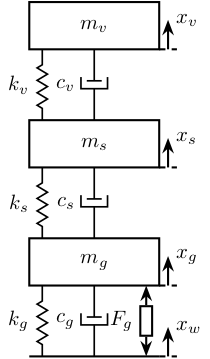
1.3 Three masses
\begin{tikzpicture} % ==================== % Parameters % ==================== \def\massw{2.2} % Width of the masses \def\massh{0.8} % Height of the masses \def\spaceh{1.2} % Height of the springs/dampers \def\dispw{0.3} % Width of the dashed line for the displacement \def\disph{0.5} % Height of the arrow for the displacements \def\bracs{0.05} % Brace spacing vertically \def\brach{-10pt} % Brace shift horizontaly % ==================== % ==================== % Ground % ==================== \draw (-0.5*\massw, 0) -- (0.5*\massw, 0); \draw[dashed] (0.5*\massw, 0) -- ++(\dispw, 0); \draw[->] (0.5*\massw+0.5*\dispw, 0) -- ++(0, \disph) node[right]{$x_{w}$}; % ==================== % Granite \begin{scope}[shift={(0, 0)}] % Mass \draw[fill=white] (-0.5*\massw, \spaceh) rectangle (0.5*\massw, \spaceh+\massh) node[pos=0.5]{$m_{g}$}; % Spring, Damper, and Actuator \draw[spring] (-0.4*\massw, 0) -- (-0.4*\massw, \spaceh) node[midway, left=0.1]{$k_{g}$}; \draw[damper] (0, 0) -- ( 0, \spaceh) node[midway, left=0.2]{$c_{g}$}; \draw[actuator] ( 0.4*\massw, 0) -- ( 0.4*\massw, \spaceh) node[midway, left=0.1](F){$F_{g}$}; % Displacements \draw[dashed] (0.5*\massw, \spaceh) -- ++(\dispw, 0); \draw[->] (0.5*\massw+0.5*\dispw, \spaceh) -- ++(0, \disph) node[right]{$x_{g}$}; % Legend % \draw[decorate, decoration={brace, amplitude=8pt}, xshift=\brach] % % (-0.5*\massw, \bracs) -- (-0.5*\massw, \spaceh+\massh-\bracs) % % node[midway,rotate=90,anchor=south,yshift=10pt]{Support}; \end{scope} % Stages \begin{scope}[shift={(0, \spaceh+\massh)}] % Mass \draw[fill=white] (-0.5*\massw, \spaceh) rectangle (0.5*\massw, \spaceh+\massh) node[pos=0.5]{$m_{s}$}; % Spring, Damper, and Actuator \draw[spring] (-0.4*\massw, 0) -- (-0.4*\massw, \spaceh) node[midway, left=0.1]{$k_{s}$}; \draw[damper] (0, 0) -- ( 0, \spaceh) node[midway, left=0.2]{$c_{s}$}; % Displacements \draw[dashed] (0.5*\massw, \spaceh) -- ++(\dispw, 0); \draw[->] (0.5*\massw+0.5*\dispw, \spaceh) -- ++(0, \disph) node[right]{$x_{s}$}; % Legend % \draw[decorate, decoration={brace, amplitude=8pt}, xshift=\brach] % % (-0.5*\massw, \bracs) -- (-0.5*\massw, \spaceh+\massh-\bracs) % % node[midway,rotate=90,anchor=south,yshift=10pt]{Actuator}; \end{scope} % Hexapod \begin{scope}[shift={(0, 2*(\spaceh+\massh))}] % Mass \draw[fill=white] (-0.5*\massw, \spaceh) rectangle (0.5*\massw, \spaceh+\massh) node[pos=0.5]{$m_{v}$}; % Spring, Damper, and Actuator \draw[spring] (-0.4*\massw, 0) -- (-0.4*\massw, \spaceh) node[midway, left=0.1]{$k_{v}$}; \draw[damper] (0, 0) -- ( 0, \spaceh) node[midway, left=0.2]{$c_{v}$}; % Displacements \draw[dashed] (0.5*\massw, \spaceh) -- ++(\dispw, 0); \draw[->] (0.5*\massw+0.5*\dispw, \spaceh) -- ++(0, \disph) node[right]{$x_{v}$}; % Legend % \draw[decorate, decoration={brace, amplitude=8pt}, xshift=\brach] % % (-0.5*\massw, \bracs) -- (-0.5*\massw, \spaceh+\massh-\bracs) % % node[midway,rotate=90,anchor=south,yshift=10pt]{Flexibility}; \end{scope} \end{tikzpicture}
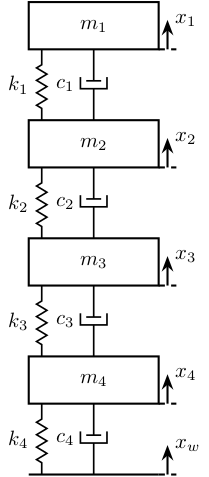
1.4 Four masses
\begin{tikzpicture} % ==================== % Parameters \def\massw{2.2} % Width of the masses \def\massh{0.8} % Height of the masses \def\spaceh{1.2} % Height of the springs/dampers \def\dispw{0.3} % Width of the dashed line for the displacement \def\disph{0.5} % Height of the arrow for the displacements \def\bracs{0.05} % Brace spacing vertically \def\brach{-10pt} % Brace shift horizontaly % ==================== % Ground \draw (-0.5*\massw, 0) -- (0.5*\massw, 0); \draw[dashed] (0.5*\massw, 0) -- ++(\dispw, 0); \draw[->] (0.5*\massw+0.5*\dispw, 0) -- ++(0, \disph) node[right]{$x_{w}$}; \begin{scope}[shift={(0, 0*(\spaceh+\massh))}] % Mass \draw[fill=white] (-0.5*\massw, \spaceh) rectangle (0.5*\massw, \spaceh+\massh) node[pos=0.5]{$m_4$}; % Spring, Damper, and Actuator \draw[spring] (-0.4*\massw, 0) -- (-0.4*\massw, \spaceh) node[midway, left=0.1]{$k_4$}; \draw[damper] (0, 0) -- ( 0, \spaceh) node[midway, left=0.2]{$c_4$}; % Displacements \draw[dashed] (0.5*\massw, \spaceh) -- ++(\dispw, 0); \draw[->] (0.5*\massw+0.5*\dispw, \spaceh) -- ++(0, \disph) node[right]{$x_4$}; \end{scope} \begin{scope}[shift={(0, 1*(\spaceh+\massh))}] % Mass \draw[fill=white] (-0.5*\massw, \spaceh) rectangle (0.5*\massw, \spaceh+\massh) node[pos=0.5]{$m_3$}; % Spring, Damper, and Actuator \draw[spring] (-0.4*\massw, 0) -- (-0.4*\massw, \spaceh) node[midway, left=0.1]{$k_3$}; \draw[damper] (0, 0) -- ( 0, \spaceh) node[midway, left=0.2]{$c_3$}; % Displacements \draw[dashed] (0.5*\massw, \spaceh) -- ++(\dispw, 0); \draw[->] (0.5*\massw+0.5*\dispw, \spaceh) -- ++(0, \disph) node[right]{$x_3$}; \end{scope} \begin{scope}[shift={(0, 2*(\spaceh+\massh))}] % Mass \draw[fill=white] (-0.5*\massw, \spaceh) rectangle (0.5*\massw, \spaceh+\massh) node[pos=0.5]{$m_2$}; % Spring, Damper, and Actuator \draw[spring] (-0.4*\massw, 0) -- (-0.4*\massw, \spaceh) node[midway, left=0.1]{$k_2$}; \draw[damper] (0, 0) -- ( 0, \spaceh) node[midway, left=0.2]{$c_2$}; % Displacements \draw[dashed] (0.5*\massw, \spaceh) -- ++(\dispw, 0); \draw[->] (0.5*\massw+0.5*\dispw, \spaceh) -- ++(0, \disph) node[right]{$x_2$}; \end{scope} \begin{scope}[shift={(0, 3*(\spaceh+\massh))}] % Mass \draw[fill=white] (-0.5*\massw, \spaceh) rectangle (0.5*\massw, \spaceh+\massh) node[pos=0.5]{$m_1$}; % Spring, Damper, and Actuator \draw[spring] (-0.4*\massw, 0) -- (-0.4*\massw, \spaceh) node[midway, left=0.1]{$k_1$}; \draw[damper] (0, 0) -- ( 0, \spaceh) node[midway, left=0.2]{$c_1$}; % Displacements \draw[dashed] (0.5*\massw, \spaceh) -- ++(\dispw, 0); \draw[->] (0.5*\massw+0.5*\dispw, \spaceh) -- ++(0, \disph) node[right]{$x_1$}; \end{scope} \end{tikzpicture}
2 Mass-Spring Systems - bis
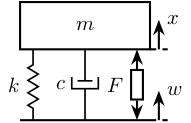
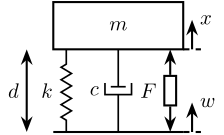
2.1 One mass
\begin{tikzpicture} % ==================== % Parameters % ==================== \def\massw{2.2} % Width of the masses \def\massh{0.8} % Height of the masses \def\spaceh{1.2} % Height of the springs/dampers \def\dispw{0.3} % Width of the dashed line for the displacement \def\disph{0.5} % Height of the arrow for the displacements \def\bracs{0.05} % Brace spacing vertically \def\brach{-10pt} % Brace shift horizontaly % ==================== % ==================== % Ground % ==================== \draw (-0.5*\massw, 0) -- (0.5*\massw, 0); \draw[dashed] (0.5*\massw, 0) -- ++(\dispw, 0); \draw[->] (0.5*\massw+0.5*\dispw, 0) -- ++(0, \disph) node[right]{$w$}; % ==================== \begin{scope}[shift={(0, 0)}] % Mass \draw[fill=white] (-0.5*\massw, \spaceh) rectangle (0.5*\massw, \spaceh+\massh) node[pos=0.5]{$m$}; % Spring, Damper, and Actuator \draw[spring] (-0.4*\massw, 0) -- (-0.4*\massw, \spaceh) node[midway, left=0.1]{$k$}; \draw[damper] (0, 0) -- ( 0, \spaceh) node[midway, left=0.2]{$c$}; \draw[actuator] ( 0.4*\massw, 0) -- ( 0.4*\massw, \spaceh) node[midway, left=0.1](F){$F$}; % Displacements \draw[dashed] (0.5*\massw, \spaceh) -- ++(\dispw, 0); \draw[->] (0.5*\massw+0.5*\dispw, \spaceh) -- ++(0, \disph) node[right]{$x$}; % Legend % \draw[decorate, decoration={brace, amplitude=8pt}, xshift=\brach] % % (-0.5*\massw, \bracs) -- (-0.5*\massw, \spaceh+\massh-\bracs) % % node[midway,rotate=90,anchor=south,yshift=10pt]{}; \end{scope} \end{tikzpicture}
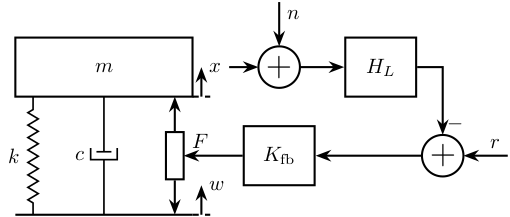
2.2 One mass - Control
\begin{tikzpicture} % ==================== % Parameters % ==================== \def\massw{3} % Width of the masses \def\massh{1} % Height of the masses \def\spaceh{2} % Height of the springs/dampers \def\dispw{0.3} % Width of the dashed line for the displacement \def\disph{0.5} % Height of the arrow for the displacements \def\bracs{0.05} % Brace spacing vertically \def\brach{-10pt} % Brace shift horizontaly % ==================== % ==================== % Ground % ==================== \draw (-0.5*\massw, 0) -- (0.5*\massw, 0); \draw[dashed] (0.5*\massw, 0) -- ++(\dispw, 0); \draw[->] (0.5*\massw+0.5*\dispw, 0) -- ++(0, \disph) node[right]{$w$}; % ==================== \begin{scope}[shift={(0, 0)}] % Mass \draw[fill=white] (-0.5*\massw, \spaceh) rectangle (0.5*\massw, \spaceh+\massh) node[pos=0.5]{$m$}; % Spring, Damper, and Actuator \draw[spring] (-0.4*\massw, 0) -- (-0.4*\massw, \spaceh) node[midway, left=0.1]{$k$}; \draw[damper] (0, 0) -- ( 0, \spaceh) node[midway, left=0.2]{$c$}; \draw[actuator={0.8}{0.3}] ( 0.4*\massw, 0) -- ( 0.4*\massw, \spaceh) coordinate[midway, right=0.15](F); % Displacements \draw[dashed] (0.5*\massw, \spaceh) -- ++(\dispw, 0); \draw[->] (0.5*\massw+0.5*\dispw, \spaceh) -- ++(0, \disph) node[right](x){$x$}; \end{scope} \node[block, right=1 of F] (Kfb) {$K_{\text{fb}}$}; \node[addb={+}{}{-}{}{}, right=1.8 of Kfb] (add) {}; \node[addb] (addn) at (x-|Kfb) {}; \node[block, right=0.75 of addn] (Hl) {$H_L$}; \draw[->] (x) -- (addn.west); \draw[->] (addn.east) -- (Hl.west); \draw[->] (Hl.east) -| (add.north); \draw[->] (add.west) -- (Kfb.east); \draw[->] (Kfb.west) -- (F) node[above right]{$F$}; \draw[<-] (addn.north) -- ++(0,0.75) node[below right]{$n$}; \draw[<-] (add.east) -- ++(0.75,0) node[above left]{$r$}; \end{tikzpicture}
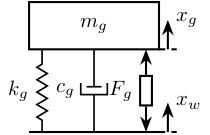
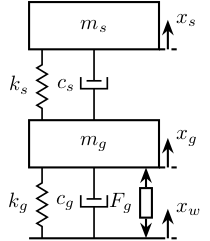
2.3 Two masses
\begin{tikzpicture} % ==================== % Parameters % ==================== \def\massw{2.2} % Width of the masses \def\massh{0.8} % Height of the masses \def\spaceh{1.2} % Height of the springs/dampers \def\dispw{0.3} % Width of the dashed line for the displacement \def\disph{0.5} % Height of the arrow for the displacements \def\bracs{0.05} % Brace spacing vertically \def\brach{-10pt} % Brace shift horizontaly % ==================== % ==================== % Ground % ==================== \draw (-0.5*\massw, 0) -- (0.5*\massw, 0); \draw[dashed] (0.5*\massw, 0) -- ++(\dispw, 0); \draw[->] (0.5*\massw+0.5*\dispw, 0) -- ++(0, \disph) node[right]{$x_{w}$}; % ==================== \begin{scope}[shift={(0, 0)}] % Mass \draw[fill=white] (-0.5*\massw, \spaceh) rectangle (0.5*\massw, \spaceh+\massh) node[pos=0.5]{$m_{g}$}; % Spring, Damper, and Actuator \draw[spring] (-0.4*\massw, 0) -- (-0.4*\massw, \spaceh) node[midway, left=0.1]{$k_{g}$}; \draw[damper] (0, 0) -- ( 0, \spaceh) node[midway, left=0.2]{$c_{g}$}; \draw[actuator] ( 0.4*\massw, 0) -- ( 0.4*\massw, \spaceh) node[midway, left=0.1](F){$F_{g}$}; % Displacements \draw[dashed] (0.5*\massw, \spaceh) -- ++(\dispw, 0); \draw[->] (0.5*\massw+0.5*\dispw, \spaceh) -- ++(0, \disph) node[right]{$x_{g}$}; % Legend % \draw[decorate, decoration={brace, amplitude=8pt}, xshift=\brach] % % (-0.5*\massw, \bracs) -- (-0.5*\massw, \spaceh+\massh-\bracs) % % node[midway,rotate=90,anchor=south,yshift=10pt]{}; \end{scope} \begin{scope}[shift={(0, \spaceh+\massh)}] % Mass \draw[fill=white] (-0.5*\massw, \spaceh) rectangle (0.5*\massw, \spaceh+\massh) node[pos=0.5]{$m_{s}$}; % Spring, Damper, and Actuator \draw[spring] (-0.4*\massw, 0) -- (-0.4*\massw, \spaceh) node[midway, left=0.1]{$k_{s}$}; \draw[damper] (0, 0) -- ( 0, \spaceh) node[midway, left=0.2]{$c_{s}$}; % Displacements \draw[dashed] (0.5*\massw, \spaceh) -- ++(\dispw, 0); \draw[->] (0.5*\massw+0.5*\dispw, \spaceh) -- ++(0, \disph) node[right]{$x_{s}$}; % Legend % \draw[decorate, decoration={brace, amplitude=8pt}, xshift=\brach] % % (-0.5*\massw, \bracs) -- (-0.5*\massw, \spaceh+\massh-\bracs) % % node[midway,rotate=90,anchor=south,yshift=10pt]{}; \end{scope} \end{tikzpicture}
2.4 Three masses
\begin{tikzpicture} % ==================== % Parameters % ==================== \def\massw{2.2} % Width of the masses \def\massh{0.8} % Height of the masses \def\spaceh{1.2} % Height of the springs/dampers \def\dispw{0.3} % Width of the dashed line for the displacement \def\disph{0.5} % Height of the arrow for the displacements \def\bracs{0.05} % Brace spacing vertically \def\brach{-10pt} % Brace shift horizontaly % ==================== % ==================== % Ground % ==================== \draw (-0.5*\massw, 0) -- (0.5*\massw, 0); \draw[dashed] (0.5*\massw, 0) -- ++(\dispw, 0); \draw[->] (0.5*\massw+0.5*\dispw, 0) -- ++(0, \disph) node[right]{$x_{w}$}; % ==================== % Granite \begin{scope}[shift={(0, 0)}] % Mass \draw[fill=white] (-0.5*\massw, \spaceh) rectangle (0.5*\massw, \spaceh+\massh) node[pos=0.5]{$m_{g}$}; % Spring, Damper, and Actuator \draw[spring] (-0.4*\massw, 0) -- (-0.4*\massw, \spaceh) node[midway, left=0.1]{$k_{g}$}; \draw[damper] (0, 0) -- ( 0, \spaceh) node[midway, left=0.2]{$c_{g}$}; \draw[actuator] ( 0.4*\massw, 0) -- ( 0.4*\massw, \spaceh) node[midway, left=0.1](F){$F_{g}$}; % Displacements \draw[dashed] (0.5*\massw, \spaceh) -- ++(\dispw, 0); \draw[->] (0.5*\massw+0.5*\dispw, \spaceh) -- ++(0, \disph) node[right]{$x_{g}$}; % Legend % \draw[decorate, decoration={brace, amplitude=8pt}, xshift=\brach] % % (-0.5*\massw, \bracs) -- (-0.5*\massw, \spaceh+\massh-\bracs) % % node[midway,rotate=90,anchor=south,yshift=10pt]{Support}; \end{scope} % Stages \begin{scope}[shift={(0, \spaceh+\massh)}] % Mass \draw[fill=white] (-0.5*\massw, \spaceh) rectangle (0.5*\massw, \spaceh+\massh) node[pos=0.5]{$m_{s}$}; % Spring, Damper, and Actuator \draw[spring] (-0.4*\massw, 0) -- (-0.4*\massw, \spaceh) node[midway, left=0.1]{$k_{s}$}; \draw[damper] (0, 0) -- ( 0, \spaceh) node[midway, left=0.2]{$c_{s}$}; % Displacements \draw[dashed] (0.5*\massw, \spaceh) -- ++(\dispw, 0); \draw[->] (0.5*\massw+0.5*\dispw, \spaceh) -- ++(0, \disph) node[right]{$x_{s}$}; % Legend % \draw[decorate, decoration={brace, amplitude=8pt}, xshift=\brach] % % (-0.5*\massw, \bracs) -- (-0.5*\massw, \spaceh+\massh-\bracs) % % node[midway,rotate=90,anchor=south,yshift=10pt]{Actuator}; \end{scope} % Hexapod \begin{scope}[shift={(0, 2*(\spaceh+\massh))}] % Mass \draw[fill=white] (-0.5*\massw, \spaceh) rectangle (0.5*\massw, \spaceh+\massh) node[pos=0.5]{$m_{v}$}; % Spring, Damper, and Actuator \draw[spring] (-0.4*\massw, 0) -- (-0.4*\massw, \spaceh) node[midway, left=0.1]{$k_{v}$}; \draw[damper] (0, 0) -- ( 0, \spaceh) node[midway, left=0.2]{$c_{v}$}; % Displacements \draw[dashed] (0.5*\massw, \spaceh) -- ++(\dispw, 0); \draw[->] (0.5*\massw+0.5*\dispw, \spaceh) -- ++(0, \disph) node[right]{$x_{v}$}; % Legend % \draw[decorate, decoration={brace, amplitude=8pt}, xshift=\brach] % % (-0.5*\massw, \bracs) -- (-0.5*\massw, \spaceh+\massh-\bracs) % % node[midway,rotate=90,anchor=south,yshift=10pt]{Flexibility}; \end{scope} \end{tikzpicture}
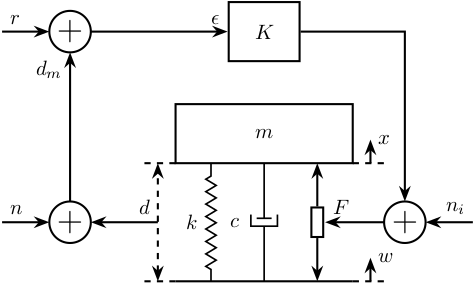
3 Control Based on distance measurement
\begin{tikzpicture} % Parameters \def\massw{3} \def\massh{1} \def\spaceh{2} % Ground \draw[] (-0.5*\massw, 0) -- (0.5*\massw, 0); % Mass \draw[] (-0.5*\massw, \spaceh) rectangle (0.5*\massw, \spaceh+\massh) node[pos=0.5](m){$m$}; % Spring, Damper, and Actuator \draw[spring] (-0.3*\massw, 0) -- (-0.3*\massw, \spaceh) node[midway, left=0.1]{$k$}; \draw[damper] ( 0, 0) -- ( 0, \spaceh) node[midway, left=0.3]{$c$}; \draw[actuator] ( 0.3*\massw, 0) -- ( 0.3*\massw, \spaceh) node[midway](F){}; % Displacements \draw[dashed] (0.5*\massw, 0) -- ++(0.2*\massw, 0); \draw[->] (0.6*\massw, 0) -- ++(0, 0.2*\spaceh) node[right]{$w$}; \draw[dashed] (0.5*\massw, \spaceh) -- ++(0.2*\massw, 0); \draw[->] (0.6*\massw, \spaceh) -- ++(0, 0.2*\spaceh) node[right]{$x$}; % Measurement \draw[dashed] (-0.5*\massw, 0) -- ++(-0.2*\massw, 0); \draw[dashed] (-0.5*\massw, \spaceh) -- ++(-0.2*\massw, 0); \draw[dashed, <->] (-0.6*\massw, 0) -- ++(0, \spaceh) node[midway](meas){}; % Noise \node[addb, left=1 of meas] (addn) {}; \draw[->] (meas.center) node[above left]{$d$} -- (addn.east); \draw[<-] (addn.west) -- ++(-0.8, 0) node[above right]{$n$}; % Controller \node[block, above=1 of m] (K) {$K$}; % Reference signal \node[addb] (addr) at (addn|-K){}; \draw[<-] (addr.west) -- ++(-0.8, 0) node[above right]{$r$}; \draw[->] (addn.north) -- (addr.south) node[below left]{$d_m$}; \draw[->] (addr.east) -- (K.west) node[above left]{$\epsilon$}; % Force injected and input noise \node[addb, right=1 of F] (addF) {}; \draw[->] (K.east) -| (addF.north); \draw[->] (addF.west) -- (F.east) node[above right]{$F$}; \draw[<-] (addF.east) -- ++(0.8, 0) node[above left]{$n_i$}; \end{tikzpicture}
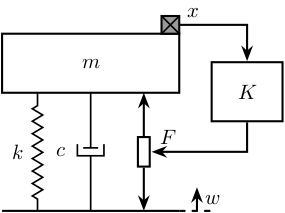
4 Inertial Control
\begin{tikzpicture} % Parameters \def\massw{3} \def\massh{1} \def\spaceh{2} % Ground \draw[] (-0.5*\massw, 0) -- (0.5*\massw, 0); % Mass \draw[fill=white] (-0.5*\massw, \spaceh) rectangle (0.5*\massw, \spaceh+\massh) node[pos=0.5](m){$m$}; % Spring, Damper, and Actuator \draw[spring] (-0.3*\massw, 0) -- (-0.3*\massw, \spaceh) node[midway, left=0.1]{$k$}; \draw[damper] ( 0, 0) -- ( 0, \spaceh) node[midway, left=0.3]{$c$}; \draw[actuator] ( 0.3*\massw, 0) -- ( 0.3*\massw, \spaceh) node[midway](F){}; % Displacements \draw[dashed] (0.5*\massw, 0) -- ++(0.2*\massw, 0); \draw[->] (0.6*\massw, 0) -- ++(0, 0.2*\spaceh) node[below right]{$w$}; % Inertial Sensor \node[inertialsensor] (inertials) at (0.5*\massw, \spaceh+\massh){}; \node[block, above right=0.5*\massh and 1 of F.east] (K){$K$}; \draw[->] (inertials.east) node[above right]{$x$} -| (K.north); \draw[->] (K.south) |- (F.east) node[above right]{$F$}; \end{tikzpicture}
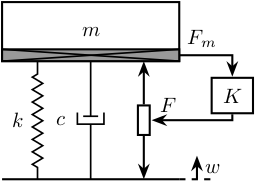
5 Force Feedback Control
\begin{tikzpicture} % Parameters \def\massw{3} \def\massh{1} \def\spaceh{2} % Ground \draw[] (-0.5*\massw, 0) -- (0.5*\massw, 0); % Mass \draw[fill=white] (-0.5*\massw, \spaceh) rectangle (0.5*\massw, \spaceh+\massh) node[pos=0.5](m){$m$}; % Spring, Damper, and Actuator \draw[spring] (-0.3*\massw, 0) -- (-0.3*\massw, \spaceh) node[midway, left=0.1]{$k$}; \draw[damper] ( 0, 0) -- ( 0, \spaceh) node[midway, left=0.3]{$c$}; \draw[actuator] ( 0.3*\massw, 0) -- ( 0.3*\massw, \spaceh) node[midway](F){}; % Force Sensor \node[forcesensor={\massw}{0.2}] (fsens) at (0, \spaceh){}; % Displacements \draw[dashed] (0.5*\massw, 0) -- ++(0.2*\massw, 0); \draw[->] (0.6*\massw, 0) -- ++(0, 0.2*\spaceh) node[below right]{$w$}; \node[block={0.7cm}{0.6cm}, above right=0.1*\massh and 1 of F.east] (K){$K$}; \draw[->] (fsens.east) node[above right]{$F_m$} -| (K.north); \draw[->] (K.south) |- (F.east) node[above right]{$F$}; \end{tikzpicture}
6 Inertial Sensor
6.1 1dof geophone or accelerometer
\begin{tikzpicture} \def\massw{2.2} % Width of the masses \def\massh{0.8} % Height of the masses \def\spaceh{1.4} % Height of the springs/dampers \def\dispw{0.3} % Width of the dashed line for the displacement \def\disph{0.5} % Height of the arrow for the displacements \def\bracs{0.05} % Brace spacing vertically \def\brach{-10pt} % Brace shift horizontaly \draw (-0.5*\massw, 0) -- (0.5*\massw, 0); \draw[dashed] (0.5*\massw, 0) -- ++(\dispw, 0); \draw[->] (0.5*\massw+0.5*\dispw, 0) -- ++(0, \disph) node[right]{$w$}; % Mass \draw[fill=white] (-0.5*\massw, \spaceh) rectangle (0.5*\massw, \spaceh+\massh) node[pos=0.5]{$m$}; % Spring, Damper, and Actuator \draw[spring] (-0.4*\massw, 0) -- (-0.4*\massw, \spaceh) node[midway, left=0.1]{$k$}; \draw[damper] (0, 0) -- ( 0, \spaceh) node[midway, left=0.2]{$c$}; \draw[actuator] ( 0.4*\massw, 0) -- ( 0.4*\massw, \spaceh) node[midway, left=0.1](F){$F$}; % Displacements \draw[dashed] (0.5*\massw, \spaceh) -- ++(\dispw, 0); \draw[->] (0.5*\massw+0.5*\dispw, \spaceh) -- ++(0, \disph) node[right]{$x$}; \draw[<->] (-0.5*\massw+-1.5*\dispw, 0) -- node[midway, left]{$d$} ++(0, \spaceh); \end{tikzpicture}
7 Mechanical Systems
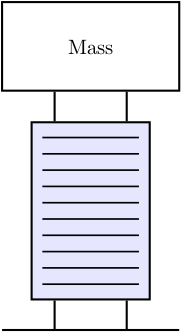
7.1 Piezoelectric Actuator
\begin{tikzpicture} \node[piezo={2}{3}{10}] (piezo) at (0, 0){}; \node[draw, fill=white, anchor=south, minimum width=3cm, minimum height=1.5cm] (mass) at ($(piezo.north)+(0, 0.5)$) {Mass}; \draw[] ($(piezo.south)+(-1.5, -0.5)$) -- ++(3, 0); \draw ($0.8*(piezo.north west)+0.2*(piezo.north east)$) -- ++(0, 0.5); \draw ($0.2*(piezo.north west)+0.8*(piezo.north east)$) -- ++(0, 0.5); \draw ($0.8*(piezo.south west)+0.2*(piezo.south east)$) -- ++(0, -0.5); \draw ($0.2*(piezo.south west)+0.8*(piezo.south east)$) -- ++(0, -0.5); \end{tikzpicture}
8 3D
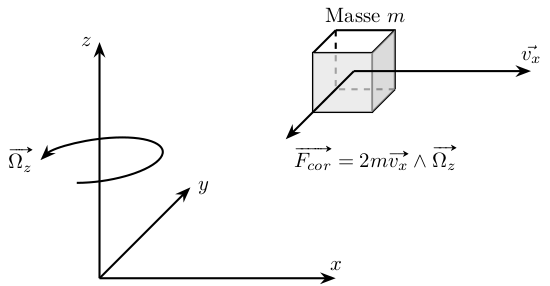
8.1 Coriolis Forces
\begin{tikzpicture} \draw[->] (0, 0, 0) -- (4, 0, 0) node[above] {$x$}; \draw[->] (0, 0, 0) -- (0, 4, 0) node[left] {$z$}; \draw[->] (0, 0, 0) -- (0, 0, -4) node[right] {$y$}; \draw[->, style={canvas is zx plane at y=2}] (1, 0) arc (0:270:1) node[left]{$\vv{\Omega_z}$}; \begin{scope}[shift={(4, 3.2, 0)}] \draw (1,0,0)--(1,1,0)--(0,1,0); \draw[dashed] (0,1,0)--(0,0,0)--(1,0,0); \draw (0,0,1)--(1,0,1)--(1,1,1)--(0,1,1)--(0,0,1); \draw[dashed] (0,0,0) -- (0,0,1); \draw (1,0,0) -- (1,0,1); \draw (1,1,0) -- (1,1,1); \draw (0,1,0) -- (0,1,1); \fill[fill=black!10, opacity=0.7] (0,0,1)--(1,0,1)--(1,1,1)--(0,1,1)--cycle; \fill[fill=black!20, opacity=0.7] (1,0,1)--(1,0,0)--(1,1,0)--(1,1,1)--cycle; \draw (0.5, 1, 0) node [above] {Masse $m$}; \draw[->] (0.5, 0.5, 0.5) -- ++(3, 0, 0) node[above]{$\displaystyle\vec{v_x}$}; \draw[->] (0.5, 0.5, 0.5) -- ++(0, 0, 3) node[below right]{$\displaystyle\vv{F_{cor}} = 2 m \vv{v_x} \wedge \vv{\Omega_z}$}; \end{scope} \end{tikzpicture}
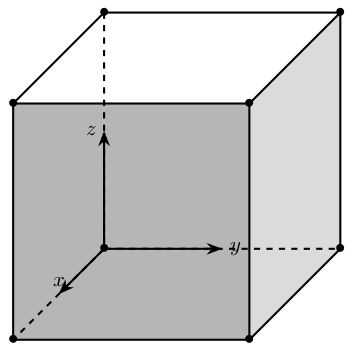
8.2 Cube
\begin{tikzpicture} \begin{scope} \fill[fill=black!40, opacity=0.7] (0,0,4) -- (4,0,4) -- (4,4,4) -- (0,4,4) -- cycle; \fill[fill=black!20, opacity=0.7] (4,0,4) -- (4,0,0) -- (4,4,0) -- (4,4,4) -- cycle; \draw (4,0,0)node{$\bullet$} -- (4,4,0)node{$\bullet$} -- (0,4,0)node{$\bullet$}; \draw[dashed] (0,4,0) -- (0,0,0) -- (4,0,0); \draw (0,0,4)node{$\bullet$} -- (4,0,4)node{$\bullet$} -- (4,4,4)node{$\bullet$} -- (0,4,4)node{$\bullet$} -- (0,0,4); \draw[dashed] (0,0,0)node{$\bullet$} -- (0,0,4); \draw (4,0,0) -- (4,0,4); \draw (4,4,0) -- (4,4,4); \draw (0,4,0) -- (0,4,4); \end{scope} \draw[->] (0, 0, 0) -- (0, 0, 2) node[above] {$x$}; \draw[->] (0, 0, 0) -- (2, 0, 0) node[right] {$y$}; \draw[->] (0, 0, 0) -- (0, 2, 0) node[left] {$z$}; \end{tikzpicture}
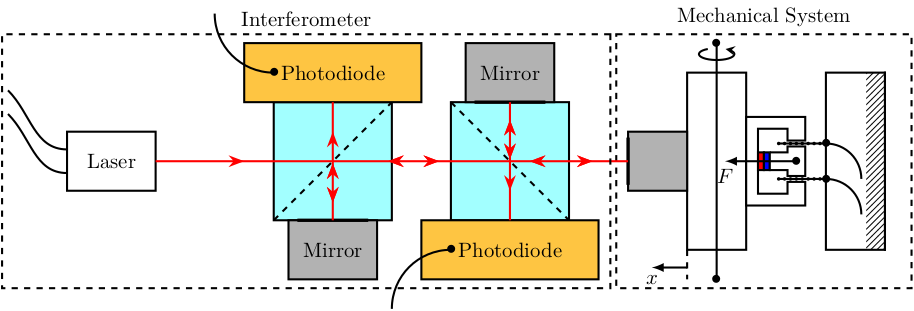
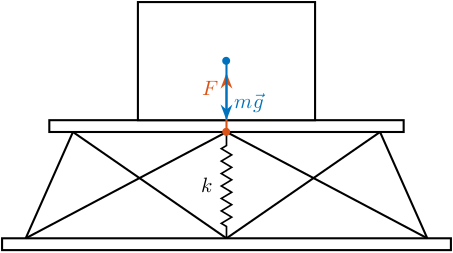
9 Gravity Compensation System
9.1 Null angle
\begin{tikzpicture} % Parameters definitions \def\baseh{0.2} % Height of the base \def\naceh{0.2} % Height of the nacelle \def\baser{3.8} % Radius of the base \def\nacer{3.0} % Radius of the nacelle \def\armr{0.2} % Radius of the arms \def\basearmborder{0.2} \def\nacearmborder{0.2} \def\xnace{0.0} % X position of the nacelle \def\ynace{2.0} % Y position of the nacelle \def\anace{0.0} % Angle of the nacelle \def\xbase{0.0} % X position of the base \def\ybase{0.0} % Y position of the base \def\abase{0.0} % Angle of the base % Hexapod1 \begin{scope}[shift={(\xbase, \ybase)}, rotate=\abase] % Base \draw[fill=white] (-\baser, 0) rectangle (\baser, \baseh); \coordinate (armbasel) at (-\baser+\basearmborder+\armr, \baseh); \coordinate (armbasec) at (0, \baseh); \coordinate (armbaser) at (\baser-\basearmborder-\armr, \baseh); % Nacelle1 \begin{scope}[shift={(\xnace, \ynace)}, rotate=\anace] \draw[fill=white] (-\nacer, 0) rectangle (\nacer, \naceh); \coordinate (armnacel) at (-\nacer+\nacearmborder+\armr, 0); \coordinate (armnacec) at (0, 0); \coordinate (armnacer) at (\nacer-\nacearmborder-\armr, 0); \end{scope} \draw (armbasec) -- (armnacer); \draw (armbasec) -- (armnacel); \draw (armbasel) -- (armnacel); \draw (armbasel) -- (armnacec); \draw (armbaser) -- (armnacec); \draw (armbaser) -- (armnacer); \draw[fill=white] (-0.5*\nacer, \ynace+\naceh) rectangle coordinate[pos=0.5](massc) (0.5*\nacer, \ynace+\naceh+2); \draw[spring] (0, \baseh) -- node[midway, left=0.1]{$k$} (0, \baseh+\ynace-\naceh) coordinate(stiffnessF); \draw[->, color=colorred] (stiffnessF)node{$\bullet$} -- ++(0, 1) node[below left]{$F$}; \end{scope} \draw[->, color=colorblue] (massc)node{$\bullet$} -- ++(0, -1) node[above right]{$m\vec{g}$}; \end{tikzpicture}
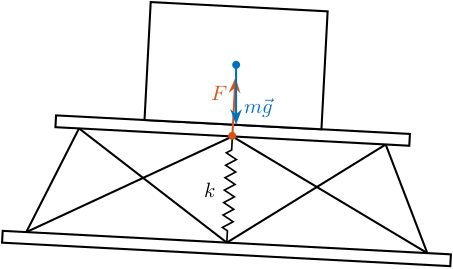
9.2 Maximum angle
\begin{tikzpicture} % Parameters definitions \def\baseh{0.2} % Height of the base \def\naceh{0.2} % Height of the nacelle \def\baser{3.8} % Radius of the base \def\nacer{3.0} % Radius of the nacelle \def\armr{0.2} % Radius of the arms \def\basearmborder{0.2} \def\nacearmborder{0.2} \def\xnace{0.0} % X position of the nacelle \def\ynace{2.0} % Y position of the nacelle \def\anace{0.0} % Angle of the nacelle \def\xbase{0.0} % X position of the base \def\ybase{0.0} % Y position of the base \def\abase{-3.0} % Angle of the base % Hexapod1 \begin{scope}[shift={(\xbase, \ybase)}, rotate=\abase] % Base \draw[fill=white] (-\baser, 0) rectangle (\baser, \baseh); \coordinate (armbasel) at (-\baser+\basearmborder+\armr, \baseh); \coordinate (armbasec) at (0, \baseh); \coordinate (armbaser) at (\baser-\basearmborder-\armr, \baseh); % Nacelle1 \begin{scope}[shift={(\xnace, \ynace)}, rotate=\anace] \draw[fill=white] (-\nacer, 0) rectangle (\nacer, \naceh); \coordinate (armnacel) at (-\nacer+\nacearmborder+\armr, 0); \coordinate (armnacec) at (0, 0); \coordinate (armnacer) at (\nacer-\nacearmborder-\armr, 0); \end{scope} \draw (armbasec) -- (armnacer); \draw (armbasec) -- (armnacel); \draw (armbasel) -- (armnacel); \draw (armbasel) -- (armnacec); \draw (armbaser) -- (armnacec); \draw (armbaser) -- (armnacer); \draw[fill=white] (-0.5*\nacer, \ynace+\naceh) rectangle coordinate[pos=0.5](massc) (0.5*\nacer, \ynace+\naceh+2); \draw[spring] (0, \baseh) -- node[midway, left=0.1]{$k$} (0, \baseh+\ynace-\naceh) coordinate(stiffnessF); \draw[->, color=colorred] (stiffnessF)node{$\bullet$} -- ++(0, 1) node[below left]{$F$}; \end{scope} \draw[->, color=colorblue] (massc)node{$\bullet$} -- ++(0, -1) node[above right]{$m\vec{g}$}; \end{tikzpicture}
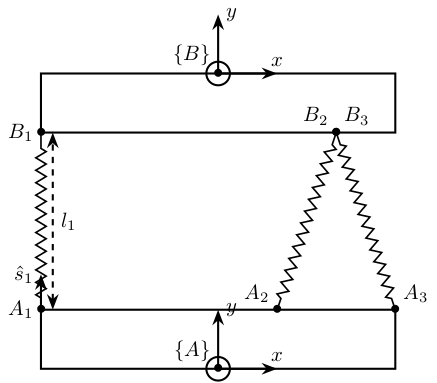
10 3Dof System
\begin{tikzpicture} \draw[fill=white] (-3, 0) -- (-3, 1) -- (3, 1) -- (3, 0) -- cycle; \draw[fill=white] (-3, 4) -- (-3, 5) -- (3, 5) -- (3, 4) -- cycle; \coordinate[] (a1) at (-3, 1); \coordinate[] (a2) at ( 1, 1); \coordinate[] (a3) at ( 3, 1); \coordinate[] (b1) at (-3, 4); \coordinate[] (b2) at ( 2, 4); \coordinate[] (b3) at ( 2, 4); \draw[spring] (a1) -- (b1); \draw[spring] (a2) -- (b2); \draw[spring] (a3) -- (b3); \node[] at (a1){$\bullet$}; \node[left] at (a1) {$A_1$}; \node[] at (a2){$\bullet$}; \node[above left] at (a2) {$A_2$}; \node[] at (a3){$\bullet$}; \node[above right] at (a3) {$A_3$}; \node[] at (b1){$\bullet$}; \node[left] at (b1) {$B_1$}; \node[] at (b2){$\bullet$}; \node[above left] at (b2) {$B_2$}; \node[] at (b3){$\bullet$}; \node[above right] at (b3) {$B_3$}; \draw[<->, dashed] ($(a1)+(0.2,0)$) -- node[midway, right]{$l_1$} ($(b1)+(0.2,0)$); \draw[->] (a1) -- ($0.8*(a1)+0.2*(b1)$) node[left]{$\hat{s}_1$}; \begin{scope}[shift={(0,0)}] \draw[->] (0, 0) -- ++(1, 0) node[above]{$x$}; \draw[->] (0, 0) -- ++(0, 1) node[right]{$y$}; \draw[] (0, 0)node[]{$\bullet$} circle [radius=0.2] node[above left]{$\{A\}$}; \end{scope} \begin{scope}[shift={(0,5)}] \draw[->] (0, 0) -- ++(1, 0) node[above]{$x$}; \draw[->] (0, 0) -- ++(0, 1) node[right]{$y$}; \draw[] (0, 0)node[]{$\bullet$} circle [radius=0.2] node[above left]{$\{B\}$}; \end{scope} \end{tikzpicture}
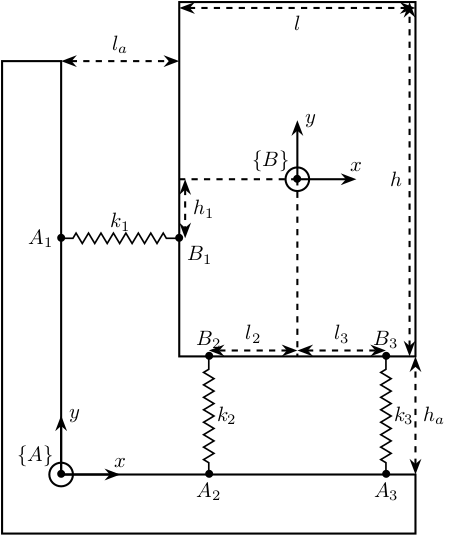
11 3Dof System - bis
\begin{tikzpicture} \draw[fill=white] (-1, -1) -- (-1, 7) -- (0, 7) -- (0, 0) -- (6, 0) -- (6, -1) -- cycle; \draw[->] (0, 0) -- ++(1, 0) node[above]{$x$}; \draw[->] (0, 0) -- ++(0, 1) node[right]{$y$}; \draw[] (0, 0)node[]{$\bullet$} circle [radius=0.2] node[above left]{$\{A\}$}; \begin{scope}[shift={(4,5)}] \draw[fill=white] (-2, -3) rectangle (2, 3); \draw[->] (0, 0) -- ++(1, 0) node[above]{$x$}; \draw[->] (0, 0) -- ++(0, 1) node[right]{$y$}; \draw[] (0, 0)node[]{$\bullet$} circle [radius=0.2] node[above left]{$\{B\}$}; \coordinate[] (b1) at (-2, -1); \coordinate[] (b2) at (-1.5, -3); \coordinate[] (b3) at ( 1.5, -3); \draw[dashed] (0, 0) -- ++(-2, 0); \draw[dashed] (0, 0) -- ++(0, -3); \draw[dashed, <->] (-1.9, 0) -- node[midway,right]{$h_1$} ++(0, -1); \draw[dashed, <->] (0, -2.9) -- node[midway,above]{$l_2$} ++(-1.5, 0); \draw[dashed, <->] (0, -2.9) -- node[midway,above]{$l_3$} ++( 1.5, 0); \draw[dashed, <->] (-2, 2.9) -- node[midway,below]{$l$} (2, 2.9); \draw[dashed, <->] ( 1.9, -3) -- node[midway,left]{$h$} (1.9, 3); \end{scope} \coordinate[] (a1) at (0, 4); \coordinate[] (a2) at (2.5, 0); \coordinate[] (a3) at (5.5, 0); \draw[spring] (a1) -- node[midway, above]{$k_1$} (b1); \draw[spring] (a2) -- node[midway, right]{$k_2$} (b2); \draw[spring] (a3) -- node[midway, right]{$k_3$} (b3); \node[] at (a1){$\bullet$}; \node[left] at (a1) {$A_1$}; \node[] at (a2){$\bullet$}; \node[below] at (a2) {$A_2$}; \node[] at (a3){$\bullet$}; \node[below] at (a3) {$A_3$}; \node[] at (b1){$\bullet$}; \node[below right] at (b1) {$B_1$}; \node[] at (b2){$\bullet$}; \node[above] at (b2) {$B_2$}; \node[] at (b3){$\bullet$}; \node[above] at (b3) {$B_3$}; \draw[<->, dashed] (0, 7) -- node[midway, above]{$l_a$} ++(2, 0); \draw[<->, dashed] (6, 0) -- node[midway, right]{$h_a$} ++(0, 2); % \draw[->] (a1) -- ($0.8*(a1)+0.2*(b1)$) node[left]{$\hat{s}_1$}; \end{tikzpicture}
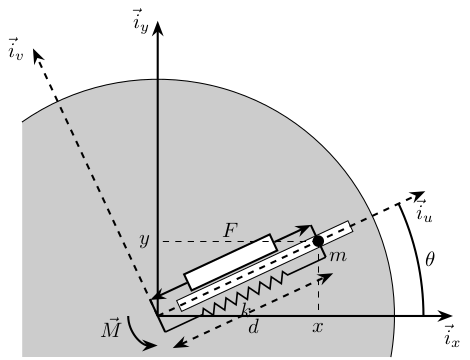
12 Rotating System
12.1 Rotating Frame - 1DoF
\begin{tikzpicture} % ================ % Parameters % ================ % Sizes \def\lengthi{5} % Size of unit vectors \def\lengthd{3} % Length of d \def\rotsize{4} % Size of the rotational stage \def\thetasize{4.5} % Size of the theta indicator \def\stagesize{0.3} % Size of the place for actuator and spring % Angles \def\thetau{25} % Current angle Theta \def\thetav{\thetau+90} % Current angle Theta+90 % ================ % Rotational Stage \draw[] (-10:\rotsize) arc (-10:125:\rotsize); \path[fill=black!20!white] (-10:\rotsize) arc (-10:125:\rotsize) |- cycle; % % Guidance % \draw[dashed, thin] (\thetau+1:\rotsize) -- ++(\thetau:-0.8*\rotsize); % \draw[dashed, thin] (\thetau-1:\rotsize) -- ++(\thetau:-0.8*\rotsize); % Inertial Frame \draw[->] (0, 0) -- (\lengthi, 0) node[below]{$\vec{i}_x$}; \draw[->] (0, 0) -- (0, \lengthi) node[left]{$\vec{i}_y$}; % Angle of rotation \draw[] (\thetasize, 0) arc (0:\thetau:\thetasize) node[midway, right]{$\theta$}; % Rotating Scope \begin{scope}[rotate=\thetau] % Guidance \draw[fill=white, thin] (0.1*\rotsize,-0.1) rectangle (0.9*\rotsize, 0.1); % Rotating Frame \draw[->, dashed] (0, 0) -- (\lengthi, 0) node[below]{$\vec{i}_u$}; \draw[->, dashed] (0, 0) -- (0, \lengthi) node[left]{$\vec{i}_v$}; % Mass \coordinate[] (mass) at (\lengthd, 0); \draw[fill=black] (mass) circle (0.08); \node[below right=0.05 and 0.05 of mass] {$m$}; % Spring and Actuator \draw[] (0, \stagesize) coordinate(act_start) -- (0, -\stagesize) coordinate(spring_start); \begin{scope}[shift={(mass)}] \draw[] (0, \stagesize) coordinate(act_end) -- (0, -\stagesize) coordinate(spring_end); \end{scope} \draw[actuator={1.6}{0.3}] (act_start) -- node[above=0.3]{$F$} (act_end); \draw[spring=0.7] (spring_start) -- node[below]{$k$} (spring_end); % Coordinates \draw[<->, dashed] (0, -2*\stagesize) coordinate(act_start) -- node[below]{$d$} (\lengthd, -2*\stagesize); \end{scope} % x-y position \coordinate[] (origin) at (0, 0); \draw[dashed, thin] (mass) -- (mass |- origin) node[below]{$x$}; \draw[dashed, thin] (mass) -- (mass -| origin) node[left]{$y$}; % Torque \draw[->] (-0.5, 0) arc (180:270:0.5) node[near start, left]{$\vec{M}$}; \end{tikzpicture}
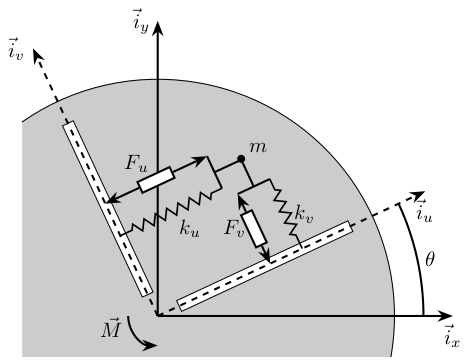
12.2 Rotating Frame - 2DoF
\begin{tikzpicture} % ================ % Parameters % ================ % Sizes \def\lengthi{5} % Size of unit vectors \def\lengthd{3} % Length of d \def\rotsize{4} % Size of the rotational stage \def\thetasize{4.5} % Size of the theta indicator \def\stagesize{0.3} % Size of the place for actuator and spring % Angles \def\thetau{25} % Current angle Theta \def\thetav{\thetau+90} % Current angle Theta+90 % ================ % Rotational Stage \draw[] (-10:\rotsize) arc (-10:125:\rotsize); \path[fill=black!20!white] (-10:\rotsize) arc (-10:125:\rotsize) |- cycle; % Inertial Frame \draw[->] (0, 0) -- (\lengthi, 0) node[below]{$\vec{i}_x$}; \draw[->] (0, 0) -- (0, \lengthi) node[left]{$\vec{i}_y$}; % Angle of rotation \draw[] (\thetasize, 0) arc (0:\thetau:\thetasize) node[midway, right]{$\theta$}; below % Rotating Scope \begin{scope}[rotate=\thetau] % Guidance \draw[fill=white, thin] (0.1*\rotsize, -0.1) rectangle (0.9*\rotsize, 0.1); \draw[fill=white, thin] (-0.1, 0.1*\rotsize) rectangle (0.1, 0.9*\rotsize); % Rotating Frame \draw[->, dashed] (0, 0) -- (\lengthi, 0) node[below]{$\vec{i}_u$}; \draw[->, dashed] (0, 0) -- (0, \lengthi) node[left]{$\vec{i}_v$}; % Mass \coordinate[] (mass) at (0.8*\lengthd, 0.6*\lengthd); \node[] at (mass){$\bullet$}; \node[above right=0 and 0 of mass] {$m$}; \draw[] (mass) -- ($(mass)+( 0, -0.5)$); \draw[] (mass) -- ($(mass)+(-0.5, 0)$); \draw[] ($(mass)+(-0.3, -0.5)$)coordinate(actv) -- ($(mass)+( 0.3, -0.5)$)coordinate(stiffv); \draw[] ($(mass)+(-0.5, 0.3)$)coordinate(actu) -- ($(mass)+(-0.5, -0.3)$)coordinate(stiffu); % \node[draw, minimum width=1cm, minimum height=1cm, transform shape] (massb) at (mass){}; % Spring and Actuator for U \draw[actuator={0.6}{0.2}] (actu) -- node[above left]{$F_u$} (actu-|0,0); \draw[spring=0.2] (stiffu) -- node[below right]{$k_u$} (stiffu-|0,0); % Spring and Actuator for V \draw[actuator={0.6}{0.2}] (actv) -- node[left]{$F_v$} (actv|-0,0); \draw[spring=0.2] (stiffv) -- node[right]{$k_v$} (stiffv|-0,0); \end{scope} % x-y position % \coordinate[] (origin) at (0, 0); % \draw[dashed, thin] (mass) -- (mass |- origin) node[below]{$x$}; % \draw[dashed, thin] (mass) -- (mass -| origin) node[left]{$y$}; % Torque \draw[->] (-0.5, 0) arc (180:270:0.5) node[near start, left]{$\vec{M}$}; \end{tikzpicture}
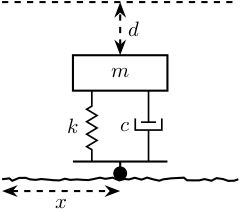
13 Guiding Errors
\begin{tikzpicture} \tikzset{% guidingpath/.style={% decorate, decoration={random steps,segment length=2.8pt,amplitude=0.8pt} } } \def\massw{1.6} % Width of the masses \def\massh{0.6} % Height of the masses \def\spaceh{1.2} % Height of the springs/dampers \draw[guidingpath] (-2,0) -- (2,0); \draw[dashed] (-2, 3) -- (2, 3); \draw[fill=black] (0, 0.1) circle [radius=0.1]; \draw[] (0, 0.2) -- ++(0, 0.1); \begin{scope}[shift={(0, 0.3)}] \draw[] (-0.5*\massw, 0) -- (0.5*\massw, 0); % Mass \draw[fill=white] (-0.5*\massw, \spaceh) rectangle (0.5*\massw, \spaceh+\massh) node[pos=0.5]{$m$}; \coordinate[] (masstop) at (0, \spaceh+\massh); % Spring, Damper, and Actuator \draw[spring] (-0.3*\massw, 0) -- (-0.3*\massw, \spaceh) node[midway, left=0.1]{$k$}; \draw[damper] ( 0.3*\massw, 0) -- ( 0.3*\massw, \spaceh) node[midway, left=0.2]{$c$}; \end{scope} \draw[dashed, <->] (masstop) -- node[midway, right]{$d$} (0, 3); \draw[dashed, <->] (-2, -0.2) -- node[midway, below]{$x$} (0, -0.2); \end{tikzpicture}
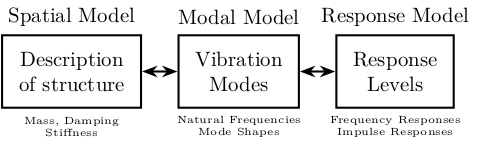
14 Vibration analysis procedure
\begin{tikzpicture} \node[block, inner sep = 8pt, align=center] (1) {Description\\of structure}; \node[block, inner sep = 8pt, align=center, right=0.6 of 1] (2) {Vibration\\Modes}; \node[block, inner sep = 8pt, align=center, right=0.6 of 2] (3) {Response\\Levels}; \draw[<->] (1) -- (2); \draw[<->] (2) -- (3); \node[above] (labelt) at (1.north) {Spatial Model}; \node[] at (2|-labelt) {Modal Model}; \node[] at (3|-labelt) {Response Model}; \node[align = center, font=\tiny, below] (labelb) at (1.south) {Mass, Damping\\Stiffness}; \node[align = center, font=\tiny] at (2|-labelb) {Natural Frequencies\\Mode Shapes}; \node[align = center, font=\tiny] at (3|-labelb) {Frequency Responses\\Impulse Responses}; \end{tikzpicture}
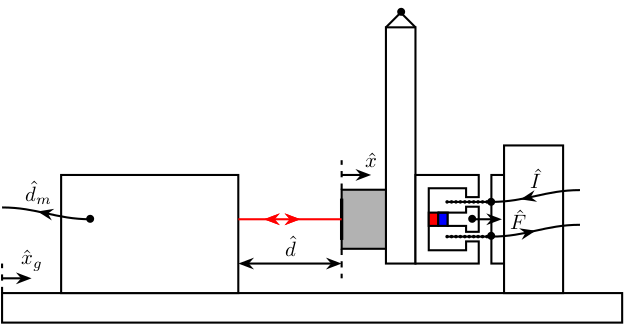
15 Pendulum Experiment
15.1 Side view
\begin{tikzpicture} % Colors \definecolor{mirror}{RGB}{178,178,178} % light grey % Pendulum \draw[fill=white] (0, 0) rectangle ++(0.5, 4); \coordinate[] (fixation) at (0.25, 4.25); \node[] at (fixation) {$\bullet$}; \draw[] (fixation) -- (0.5, 4); \draw[] (fixation) -- (0, 4); % Voice Coil \begin{scope}[shift={(0.5, 0)}] \voicecoil{1.5}{1.5}{-90}; \end{scope} % Corner Cube \draw[fill=mirror] (0, 0.25) rectangle (-0.75, 1.25); \draw[ultra thick] (-0.75, 0.4) -- (-0.75, 1.1); % Support \draw[fill=white] (-6.5, -1) rectangle (4, -0.5); % Interferometer \draw[fill=white] (-5.5, -0.5) rectangle ++(3, 2); % Voice coil fixation \draw[fill=white] (2, -0.5) rectangle ++(1, 2.5); % Coil Wires \draw[->-=.5] (vc_wire_one) node[]{$\bullet$} to[out=0,in=-180] ++(1.5, 0.2); \draw[-<-=.5] (vc_wire_two) node[]{$\bullet$} to[out=0,in=-180] node[midway, above]{$\hat{I}$} ++(1.5, 0.2); % LASER \draw[red, ->-=.6, -<-=.4] (-2.5, 0.75) -- (-0.75, 0.75); % F \draw[->] (vc_force) node[]{$\bullet$} -- ++(0.5, 0) node[right]{$\hat{F}$}; % D \draw[<->] (-2.5, 0) -- node[midway, above]{$\hat{d}$} (-0.75, 0); \draw[dashed] (-0.75, 0.25) -- (-0.75, -0.25); % x \draw[->] (-0.75, 1.5) -- ++(0.5, 0) node[above]{$\hat{x}$}; \draw[dashed] (-0.75, 1.25) -- (-0.75, 1.75); % Dm \coordinate[] (output_interferometer) at (-5, 0.75); \draw[->-=.6] (output_interferometer) node[]{$\bullet$} to[out=-180,in=0] node[pos=0.6, above]{$\hat{d}_m$} ++(-1.5, 0.2) ; % Xg \draw[->] (-6.5, -0.25) -- ++(0.5, 0) node[above]{$\hat{x}_g$}; \draw[dashed] (-6.5, -0.5) -- ++(0, 0.5); \end{tikzpicture}
15.2 Top view
\begin{tikzpicture} % Parameters definitions \def\splitw{2} % Width of the split mirrors \def\splith{2} % Height of the split mirrors \def\photow{1} % Width of the photodiodes \def\photoh{3} % Height of the photodiodes \def\mirrorw{1} % Width of the mirrors \def\mirrorh{1.5} % Height of the mirrors \def\pendulumw{3} % Width of the pendulum \def\pendulumh{1} % Height of the pendulum \def\pendmirrw{1} % Width of the mirror on the pendulum \def\pendmirrh{1} % Height of the mirror on the pendulum \def\firstinter{3} % First intersection of the beam \def\secinter{6} % Second intersection of the beam \def\finalinter{9} % Intersection with the pendulum \def\magnetw{1.5} % Width of the magnet \def\magneth{1.0} % Height of the magnet \def\magnetwb{0.2} % Width of the borders of the magnet \def\magnethl{0.2} % Height of the low part of the magnet \def\magnetmw{0.3} % Width of the middle part of the magnet \def\magnetmh{0.2} % Height of the middle part of the magnet \def\magnethg{0.3} % Height of the gap of the magnet \def\magnetwg{0.7} % Width of the gap of the magnet % Colors \definecolor{split}{RGB}{162,255,255} % light blue \definecolor{photodiode}{RGB}{254,197,66} % light orange \definecolor{mirror}{RGB}{178,178,178} % light grey \begin{scope}[rotate=-90] % Label positions \pgfmathsetmacro{\labelright}{0.5*\splitw+\photow+0.5}% \pgfmathsetmacro{\labelleft}{-0.5*\splitw-\photow-0.5}% % Laser Source \begin{scope}[shift={(0, 0)}] \draw[fill=white] (-0.5, 0) rectangle node[pos=0.5]{Laser} (0.5, -1.5); \draw[] (-0.2, -1.5) to[out=-90,in=45] ++(-1, -1); \draw[] ( 0.2, -1.5) to[out=-90,in=45] ++(-1, -1); \end{scope} % Split Mirror 1 \begin{scope}[shift={(0, \firstinter)}] \draw[fill=split] (-0.5*\splitw, -0.5*\splith) rectangle (0.5*\splitw, 0.5*\splith); \draw[dashed] (0.5*\splitw, -0.5*\splith) -- (-0.5*\splitw, 0.5*\splith); \end{scope} % Photodiode 1 \begin{scope}[shift={(-0.5*\splitw, \firstinter)}] \draw[fill=photodiode] (-\photow, -0.5*\photoh) rectangle node[pos=0.5]{Photodiode} (0, 0.5*\photoh); \draw[] (-0.5*\photow, -0.5*\photoh+0.5*\photow) node[]{$\bullet$} to[out=-90,in=0] ++(-\photow, -\photow); \end{scope} % Mirror 1 \begin{scope}[shift={(0.5*\splitw, \firstinter)}] \draw[fill=mirror] (0, -0.5*\mirrorh) rectangle node[pos=0.5]{Mirror} (\mirrorw, 0.5*\mirrorh); \draw[ultra thick] (0, -0.4*\mirrorh) -- (0, 0.4*\mirrorh); \end{scope} % Split Mirror 2 \begin{scope}[shift={(0, \secinter)}] \draw[fill=split] (-0.5*\splitw, -0.5*\splith) rectangle (0.5*\splitw, 0.5*\splith); \draw[dashed] (-0.5*\splitw, -0.5*\splith) -- (0.5*\splitw, 0.5*\splith); \end{scope} % Photodiode 2 \begin{scope}[shift={(0.5*\splitw, \secinter)}] \draw[fill=photodiode] (0, -0.5*\photoh) rectangle node[pos=0.5]{Photodiode} (\photow, 0.5*\photoh); \draw[] (0.5*\photow, -0.5*\photoh+0.5*\photow) node[]{$\bullet$} to[out=-90,in=-180] ++(\photow, -\photow); \end{scope} % Mirror 2 \begin{scope}[shift={(-0.5*\splitw, \secinter)}] \draw[fill=mirror] (-\mirrorw, -0.5*\mirrorh) rectangle node[pos=0.5]{Mirror} (0, 0.5*\mirrorh); \draw[ultra thick] (0, -0.4*\mirrorh) -- (0, 0.4*\mirrorh); \end{scope} % Pendulum \begin{scope}[shift={(0, \finalinter)}] % Overall delimitation of the pendulum system \coordinate[] (delimmec) at (-0.5*\pendulumw-0.5*\magnetmw-0.5, -1.2); \coordinate[] (delimmecbis) at (0.5*\pendulumw+0.5*\magnetmw+0.5, \pendulumh+2.8); \draw[dashed] (delimmec) rectangle (delimmecbis); \path[] (-0.5*\pendulumw-0.5*\magnetmw-0.5, -1.2) -- (-0.5*\pendulumw-0.5*\magnetmw-0.5, \pendulumh+2.8) node[midway,above]{Mechanical System}; \draw[fill=white] (-0.5*\pendulumw, 0) rectangle (0.5*\pendulumw, \pendulumh); \draw[] (-0.5*\pendulumw-0.5, 0.5*\pendulumh) node[]{$\bullet$} -- (0.5*\pendulumw+0.5, 0.5*\pendulumh) node[]{$\bullet$}; \node[] at (-0.5*\pendulumw-0.3, 0.5*\pendulumh) {\AxisRotator[rotate=-90]}; \draw[dashed] (0.5*\pendulumw, 0) -- ++(0.5, 0); \draw[->, >=latex] (0.5*\pendulumw+0.3, 0) -- ++(0, -0.6) node[below]{$x$}; \draw[fill=mirror] (-0.5*\pendmirrw, -\pendmirrh) rectangle (0.5*\pendmirrw, 0); \draw[ultra thick] (-0.4*\pendmirrw, -\pendmirrh) -- (0.4*\pendmirrw, -\pendmirrh); \end{scope} % Magnet \begin{scope}[shift={(0, \finalinter+\pendulumh)}] \draw[fill=white] (0, 0) -| ++(0.5*\magnetw, \magneth) -| ++(-0.5*\magnetw+0.5*\magnetwg, -\magnethg) -| (0.5*\magnetw-\magnetwb, \magnethl) -| (-0.5*\magnetw+\magnetwb, \magneth-\magnethg) -| (-0.5*\magnetwg, \magneth) -| (-0.5*\magnetw, 0) -- (cycle); % Magnet \begin{scope}[shift={(0, \magnethl)}] \draw[fill=red] (-0.5*\magnetmw, 0) rectangle (0.5*\magnetmw, 0.5*\magnetmh); \draw[fill=blue] (-0.5*\magnetmw, 0.5*\magnetmh) rectangle (0.5*\magnetmw, \magnetmh); % Top conductive Magnet \draw[fill=white] (-0.5*\magnetmw, \magnetmh) -| (0.5*\magnetmw, -\magnethl+\magneth-\magnethg) -| ++(0.1, \magnethg) -| ++(-0.2-\magnetmw, -\magnethg) -| (-0.5*\magnetmw, \magnetmh); % Force \draw[->, >=latex] (0, -0.8*\magnethl+0.8*\magneth)node[]{$\bullet$} -- ++(0, -1.2) node[below]{$F$}; \end{scope} % Coil \pgfmathsetmacro{\coilwidth}{0.5*0.5*\magnetmw+0.5*0.1+0.25*\magnetwg}% \draw[] ( \coilwidth, \magneth-1.5*\magnethg) -- ++(0, 0.8); \draw[] (-\coilwidth, \magneth-1.5*\magnethg) -- ++(0, 0.8); % Point on the coil \foreach \x in {0,0.1,...,0.8} {\node[circle,inner sep=0.6pt,fill] at ( \coilwidth, \x+\magneth-1.5*\magnethg); \node[circle,inner sep=0.6pt,fill] at (-\coilwidth, \x+\magneth-1.5*\magnethg);} % Actuator Attachement \draw[fill=white] (-0.5*\pendulumw, \magneth-1.5*\magnethg+0.8) rectangle ++(\pendulumw, \pendulumh); % Ground \node (ground) [anchor=south, ground, minimum width={\pendulumw cm}, rotate=-90] at (0, \magneth-1.5*\magnethg+0.8+\pendulumh) {}; % Coil Wires \draw[] ( \coilwidth, \magneth-1.5*\magnethg+0.8) node[]{$\bullet$} to[out=90,in=-180] ++(0.6*\pendulumh, 0.6*\pendulumh); \draw[] (-\coilwidth, \magneth-1.5*\magnethg+0.8) node[]{$\bullet$} to[out=90,in=-180] ++(0.6*\pendulumh, 0.6*\pendulumh); \end{scope} % LASER \draw[red, ->-=.5] (0, 0) -- (0, \firstinter); \draw[red, ->-=.6, -<-=.4] (0, \firstinter) -- (-, \secinter); \draw[red, ->-=.7, -<-=.3] (0, \secinter) -- (0, \finalinter-\pendmirrh); \draw[red, ->-=.7, -<-=.3] (0, \firstinter) -- ++( 0.5*\splitw, 0); \draw[red, ->-=.5] (0, \firstinter) -- ++(-0.5*\splitw, 0); \draw[red, ->-=.5] (0, \secinter) -- ++( 0.5*\splitw, 0); \draw[red, ->-=.7, -<-=.3] (0, \secinter) -- ++(-0.5*\splitw, 0); % Delimitation of the Interferometer system \coordinate[] (deliminter) at ($(delimmec)-(0, 0.1)$); \coordinate[] (deliminterbis) at ($(delimmecbis)-(0, 15.4)$); \draw[dashed] (deliminter) rectangle (deliminterbis); \path[] (deliminter) -- (deliminterbis -| deliminter) node[midway, above]{Interferometer}; \end{scope} \end{tikzpicture}